German-Japanese Research cooperation in automated and connected driving (VIVID)
 © TU Ilmenau
© TU Ilmenau
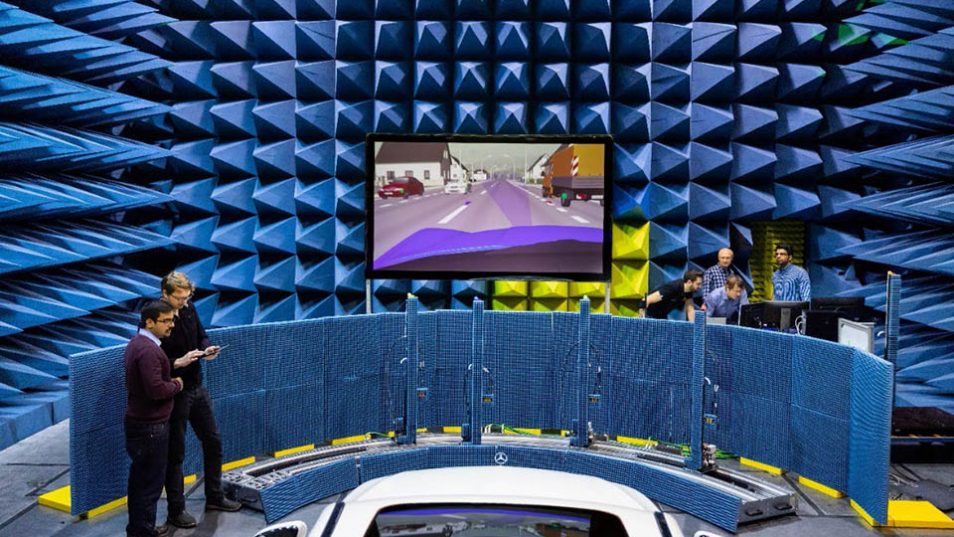
仮想環境において、コネクテッドカーや自動運転車の走行安全性を試験・評価・担保するには?この問いに取り組むのが日独連携VIVIDプロジェクトです。
自動運転の高度化・完全化には、車両に機能・システム面で最高レベルの安全性が備わっていることが不可欠です。
そこで日独連携VIVIDプロジェクトは、共同研究開発によりノウハウのやりとりを促すとともに、各国独自の知見を各種手法の共同開発に活かすことを目指しています。
コネクテッドカーや自動運転車の走行には、車両と機能に最高レベルの安全性が求められます。その前提として、冗長性を備えたセンシング技術の他、コントロールセンターや他の車両・通行主体との高度なワイヤレス通信により、環境を総合的に把握する技術が必須です。

安全性の確保は、コネクテッドカーや自動運転車の開発・認証の前提条件の一つです。そのため日独連携VIVIDプロジェクトでは、仮想空間での安全性評価を通じたシナリオごとの検証に焦点を当てています。非競争領域でのノウハウのやりとりが、国際基準調和と標準化に貢献しています。VIVIDが取り組むのは「コネクテッドカーや自動運転車の走行安全性を試験・評価・担保するにはいかにすべきか」という重要な課題です。
仮想環境においてどこまで現実に近いシミュレーションを実現できるのか、そしてそれが実証実験の複雑性をどこまで再現できるのか、といった点がこのプロジェクトの研究対象です。この日独連携にはモデルとインターフェースの収束といった両者に共通する面と、異なる成果やアプローチを通じたモデルポートフォリオの補足といった相互補完的な面とがあり、これらが付加価値をもたらしています。
日独の合同推進体制では、環境・センサモデルやシミュレーションモデルの検証等、6つのテーマ別ワーキンググループで連携しており、今後の研究課題としては分野・技術横断的適応型センサモデルや5G/6Gコネクティビティ、データフュージョン、シミュレーションチェーン間および仮想・現実間のシームレスインタラクション、データ駆動型モデリングの品質指標等が挙がっています。こうした取り組みを通じ、安全でクリーンかつ効率的な移動手段としてのコネクテッドカーや自動運転車を、各国で日常的に活用できるようになるでしょう。

VIVID概要
ネットワーク コーディネーター: イルメナウ工科大学 チューリンゲン・イノベーションセンター・モビリティ 高周波・マイクロ波部門 マティアス・ハイン教授
matthias.hein@tu-ilmenau.de
資金規模: 467万ユーロ、BMBF(ドイツ連邦教育研究省)助成金333万ユーロ+参加大学へのいわゆるプロジェクト一時金35万ユーロ
期間: 2020年10月1日~2023年9月30日
担当:
連邦教育研究省エレクトロニクス・自動運転・スーパーコンピューティング課ラインホルト・フリードリヒ
reinhold.friedrich@bmbf.bund.de
プロジェクトパートナー
・ ADC オートモーティブ ディスタンス コントロール システム
・ AVLドイツ
・ ブリックフェルト
・ ドイツ航空宇宙センター
・ IPGオートモーティブ
・ ケンプテン応用科学大学
・ カールスルーエ工科大学
・ メルセデス・ベンツ
・ ダルムシュタット工科大学
・ イルメナウ工科大学
日本側協力パートナー(DIVP®)
・ トヨタ自動車株式会社
・ 本田技研工業株式会社
・ 日産自動車株式会社
・ 神奈川工科大学
・ BIPROGY株式会社
・ 株式会社SOKEN
・ 三菱プレシジョン社
・ SOLIZE株式会社
・ ソニーセミコンダクタソリューションズ株式会社
・ 株式会社デンソー
・ パイオニア株式会社
・ 株式会社アドバンスド・データ・コントロールズ
・ 株式会社ユーシン
・ デロイト
参考情報
・ VIVID
・ DIVP
・ SIP-adus ワークショップ 2022 in 京都
DWIH東京のニュースレターでは日独の研究・イノベーション関連の最新ニュース、公募、イベントなど様々な情報を提供しています。ニュースレター登録はこちら